本节将介绍Golang的GPM模型在各种场景的调度变化的全分析,这些场景几乎能够涵盖全部的G在调度的过程中所遇见到的情况,通过这些调度场景的分析也能够帮助我们去更好的体会Golang调度器的魅力。
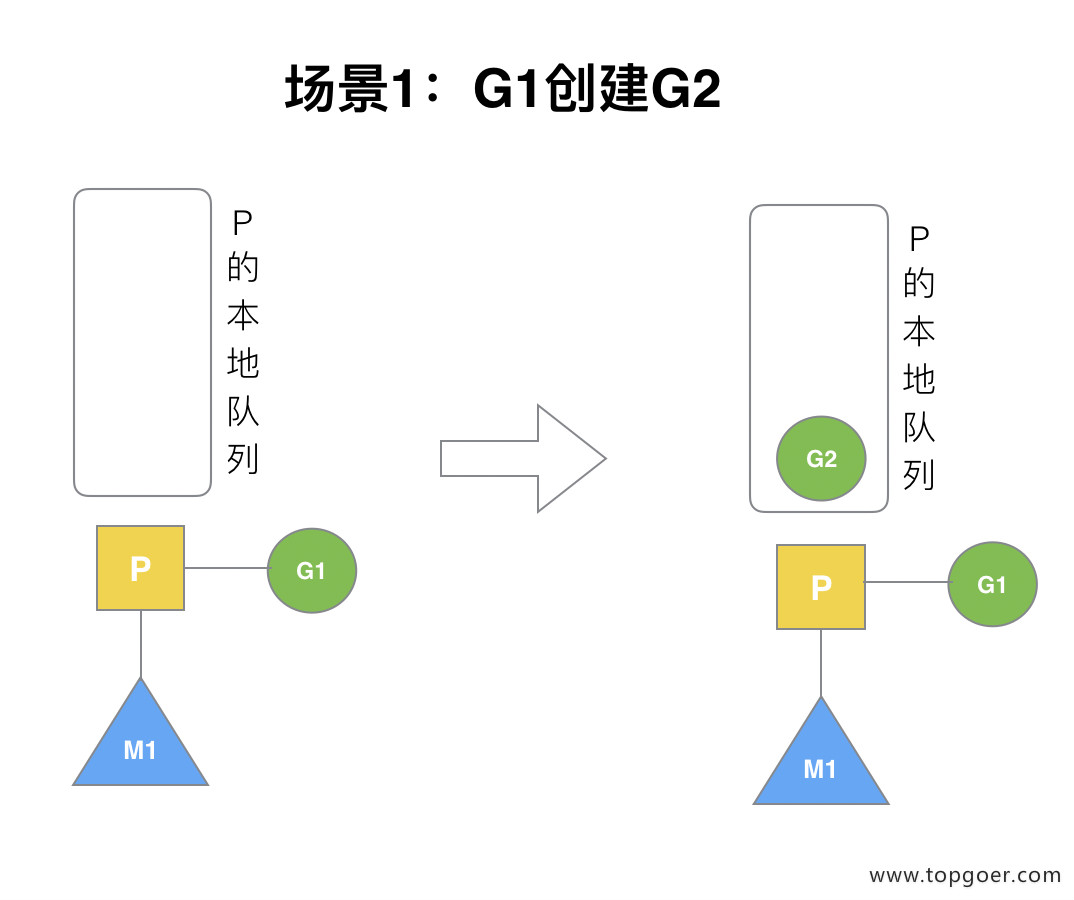
场景1:G1创建G2
P 拥有 G1,M1 获取 P 后开始运行 G1,G1 使用 go func() 创建了 G2,为了局部性 G2 优先加入到 P1 的本地队列。
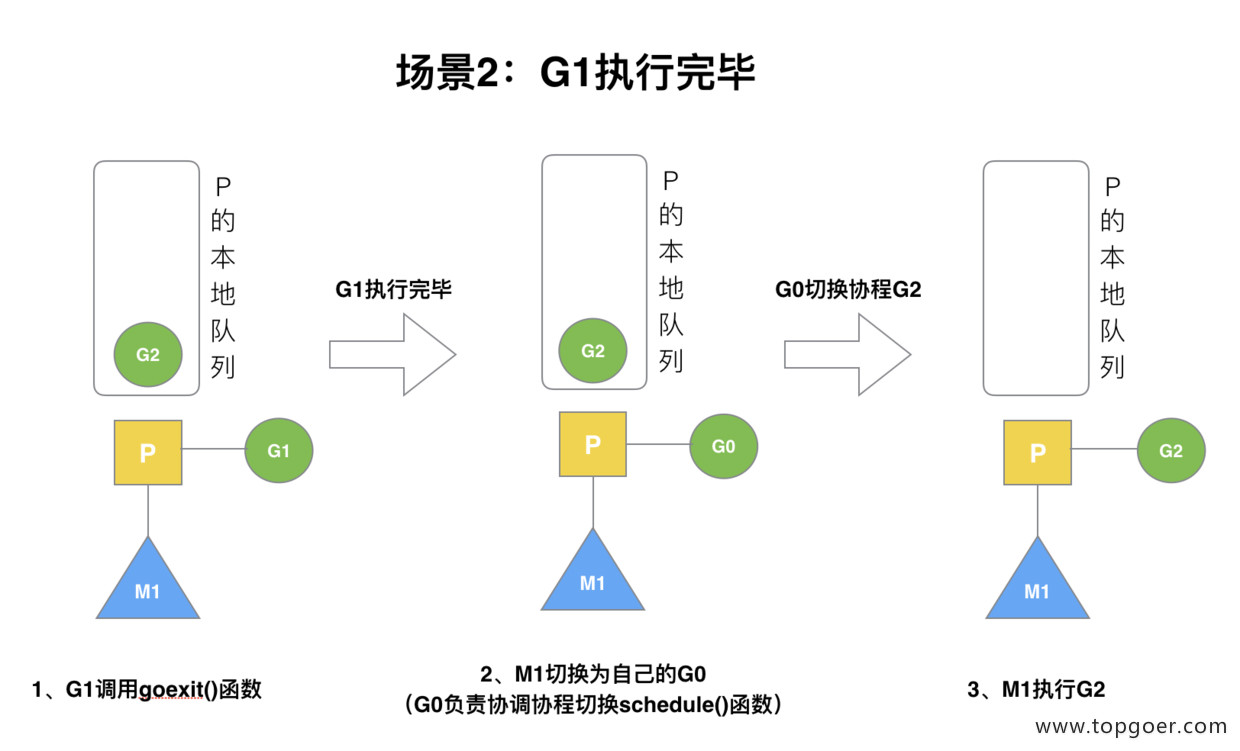
场景2:G1执行完毕
G1 运行完成后 (函数:goexit),M 上运行的 goroutine 切换为 G0,G0 负责调度时协程的切换(函数:schedule)。从 P 的本地队列取 G2,从 G0 切换到 G2,并开始运行 G2 (函数:execute)。实现了线程 M1 的复用。
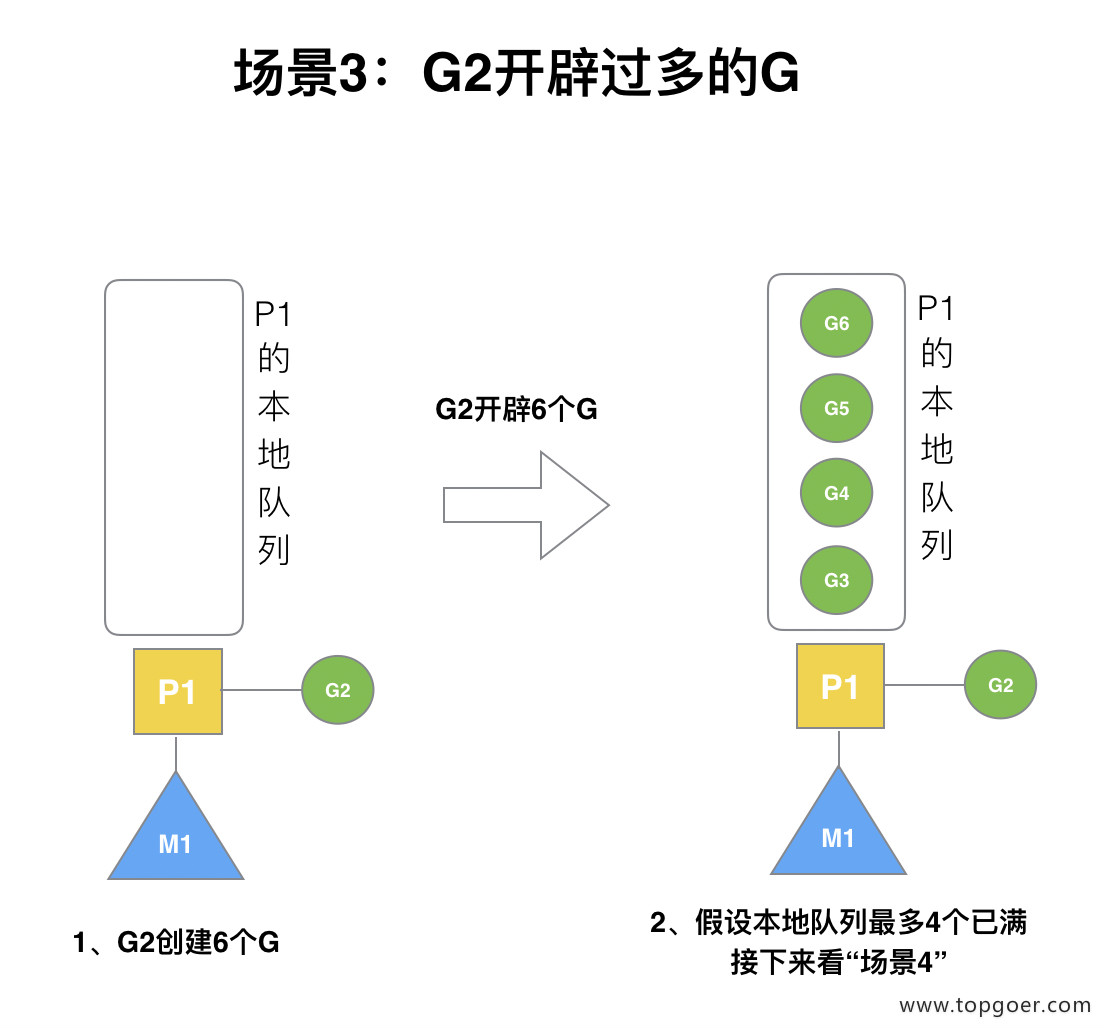
场景3:G2开辟过多的G
假设每个 P 的本地队列只能存 3 个 G。G2 要创建了 6 个 G,前 3 个 G(G3, G4, G5)已经加入 p1 的本地队列,p1 本地队列满了。
场景4:G2本地满再创建G7
G2 在创建 G7 的时候,发现 P1 的本地队列已满,需要执行负载均衡 (把 P1 中本地队列中前一半的 G,还有新创建 G 转移到全局队列)
(实现中并不一定是新的 G,如果 G 是 G2 之后就执行的,会被保存在本地队列,利用某个老的 G 替换新 G 加入全局队列)
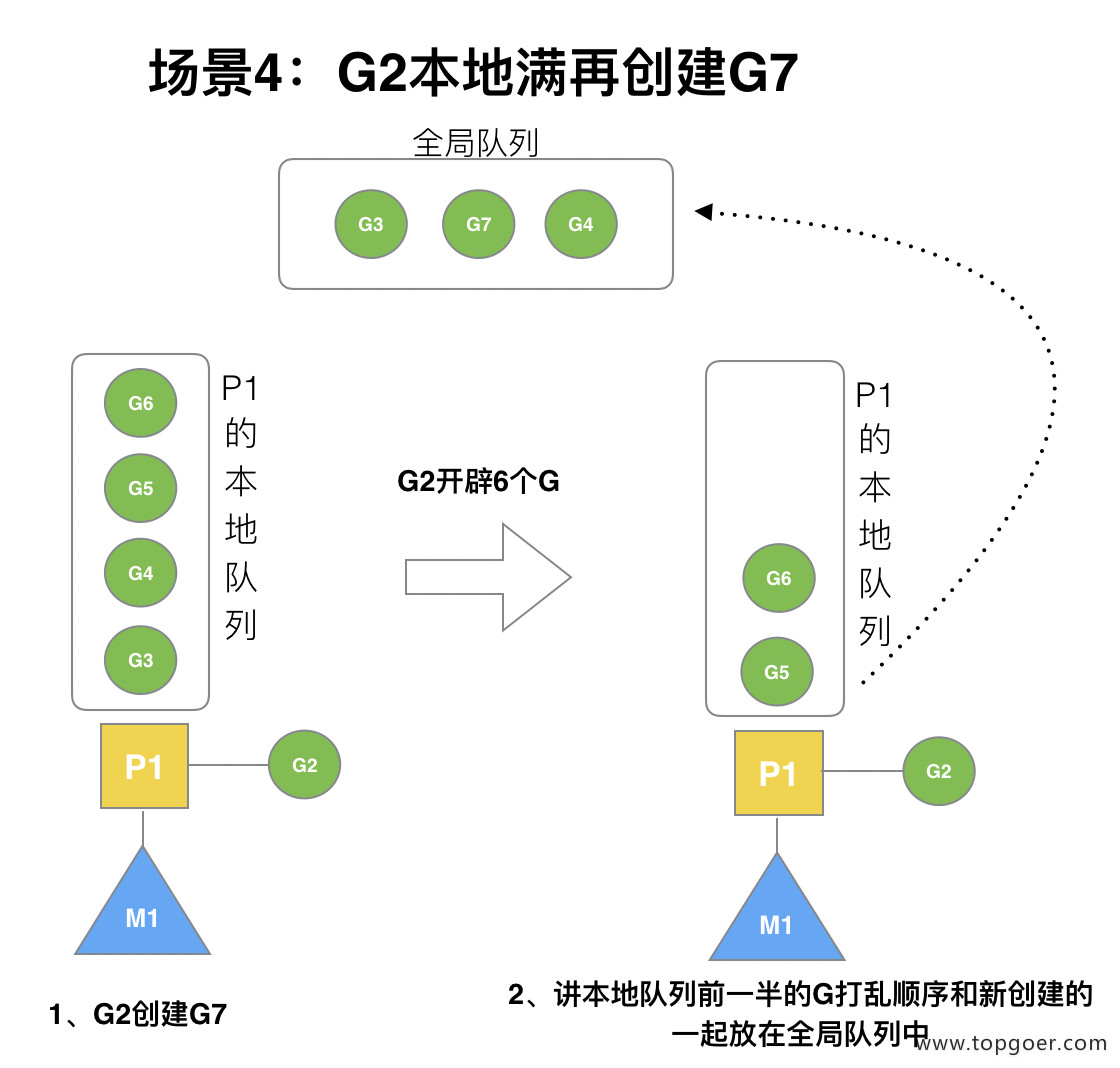
这些 G 被转移到全局队列时,会被打乱顺序。所以 G3,G4,G7 被转移到全局队列。
场景5:G2本地未满再创建G8
G2 创建 G8 时,P1 的本地队列未满,所以 G8 会被加入到 P1 的本地队列。
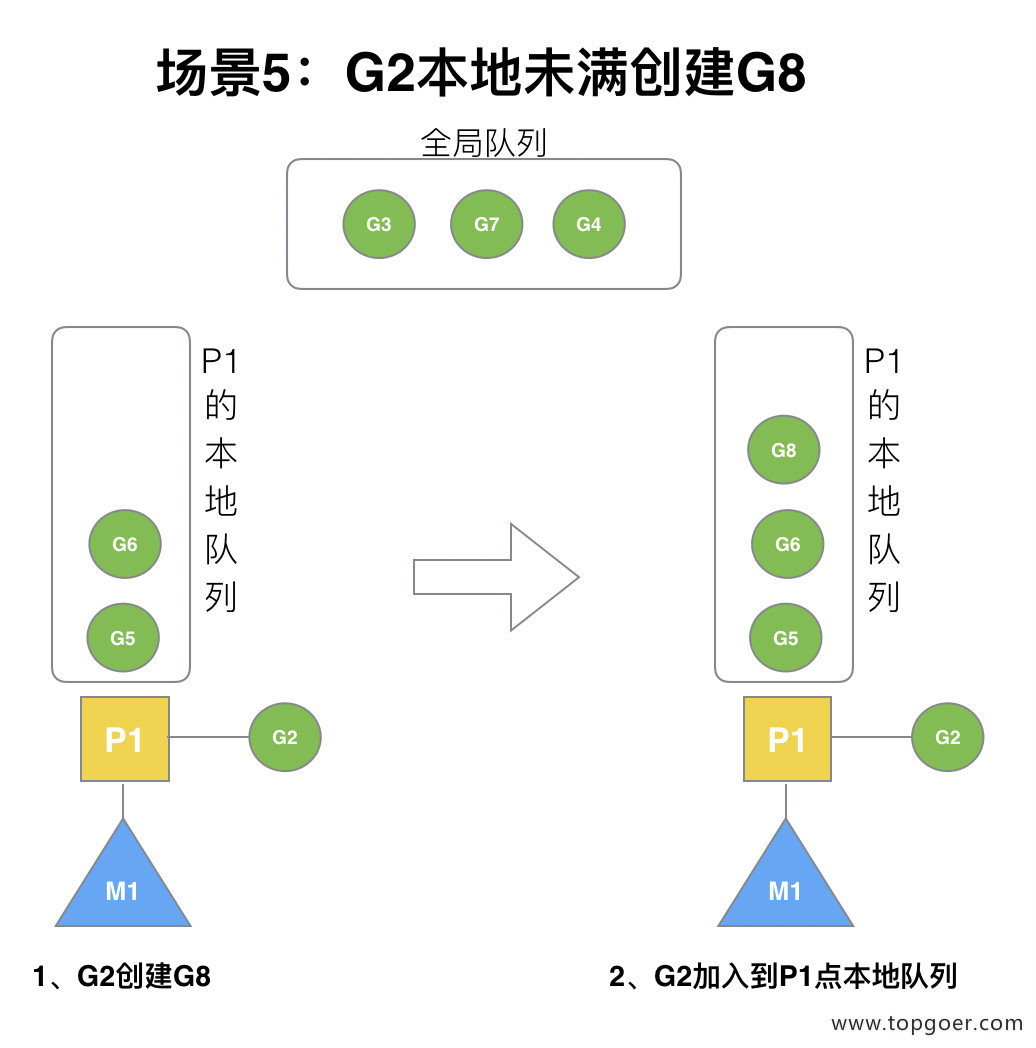
G8 加入到 P1 点本地队列的原因还是因为 P1 此时在与 M1 绑定,而 G2 此时是 M1 在执行。所以 G2 创建的新的 G 会优先放置到自己的 M 绑定的 P 上。
场景6:唤醒正在休眠的M
规定: 在创建 G 时,运行的 G 会尝试唤醒其他空闲的 P 和 M 组合去执行。

假定 G2 唤醒了 M2,M2 绑定了 P2,并运行 G0,但 P2 本地队列没有 G,M2 此时为自旋线程(没有 G 但为运行状态的线程,不断寻找 G)。
场景7:被唤醒的M2从全局队列批量取G
M2 尝试从全局队列 (简称 “GQ”) 取一批 G 放到 P2 的本地队列(函数:findrunnable())。
M2 从全局队列取的 G 数量符合下面的公式:
n = min(len(GQ)/GOMAXPROCS + 1, len(GQ/2))
参考源代码如下:
//usr/local/go/src/runtime/proc.go
//…
// 从全局队列中偷取,调用时必须锁住调度器
func globrunqget(_p_ *p, max int32)*g {
// 如果全局队列中没有 g 直接返回
if sched.runqsize ==0 {
return nil
}
// per-P 的部分,如果只有一个 P 的全部取
n := sched.runqsize/gomaxprocs +1
if n > sched.runqsize {
n = sched.runqsize
}
// 不能超过取的最大个数
if max > 0 && n > max {
n = max
}
// 计算能不能在本地队列中放下 n 个
if n > int32(len(_p_.runq))/2 {
n =int32(len(_p_.runq))/2
}
// 修改本地队列的剩余空间
sched.runqsize -= n
// 拿到全局队列队头 g
gp := sched.runq.pop()
// 计数
n--
// 继续取剩下的 n-1 个全局队列放入本地队列
for ; n > 0; n-- {
gp1 := sched.runq.pop()
runqput(_p_, gp1,false)
}
return gp
}
//…至少从全局队列取 1 个 g,但每次不要从全局队列移动太多的 g 到 p 本地队列,给其他 p 留点。这是从全局队列到 P 本地队列的负载均衡。

假定我们场景中一共有 4 个 P(GOMAXPROCS 设置为 4,那么我们允许最多就能用 4 个 P 来供 M 使用)。所以 M2 只从能从全局队列取 1 个 G(即 G3)移动 P2 本地队列,然后完成从 G0 到 G3 的切换,运行 G3。
场景8:M2从M1中偷取
假设 G2 一直在 M1 上运行,经过 2 轮后,M2 已经把 G7、G4 从全局队列获取到了 P2 的本地队列并完成运行,全局队列和 P2 的本地队列都空了,如场景 8 图的左半部分。

场景9:自旋线程的最大限制
G1 本地队列 G5、G6 已经被其他 M 偷走并运行完成,当前 M1 和 M2 分别在运行 G2 和 G8,M3 和 M4 没有 goroutine 可以运行,M3 和 M4 处于自旋状态,它们不断寻找 goroutine。

为什么要让 m3 和 m4 自旋,自旋本质是在运行,线程在运行却没有执行 G,就变成了浪费 CPU. 为什么不销毁现场,来节约 CPU 资源。因为创建和销毁 CPU 也会浪费时间,我们希望当有新 goroutine 创建时,立刻能有 M 运行它,如果销毁再新建就增加了时延,降低了效率。当然也考虑了过多的自旋线程是浪费 CPU,所以系统中最多有 GOMAXPROCS 个自旋的线程 (当前例子中的 GOMAXPROCS=4,所以一共 4 个 P),多余的没事做线程会让他们休眠。
场景10:G发生阻塞的系统调用
假定当前除了 M3 和 M4 为自旋线程,还有 M5 和 M6 为空闲的线程 (没有得到 P 的绑定,注意我们这里最多就只能够存在 4 个 P,所以 P 的数量应该永远是 M>=P, 大部分都是 M 在抢占需要运行的 P),G8 创建了 G9,G8 进行了阻塞的系统调用,M2 和 P2 立即解绑,P2 会执行以下判断:如果 P2 本地队列有 G、全局队列有 G 或有空闲的 M,P2 都会立马唤醒 1 个 M 和它绑定,否则 P2 则会加入到空闲 P 列表,等待 M 来获取可用的 p。本场景中,P2 本地队列有 G9,可以和其他空闲的线程 M5 绑定。

场景11:G发生非阻塞的系统调用
G8 创建了 G9,假如 G8 进行了非阻塞系统调用。

M2 和 P2 会解绑,但 M2 会记住 P2,然后 G8 和 M2 进入系统调用状态。当 G8 和 M2 退出系统调用时,会尝试获取 P2,如果无法获取,则获取空闲的 P,如果依然没有,G8 会被记为可运行状态,并加入到全局队列,M2 因为没有 P 的绑定而变成休眠状态 (长时间休眠等待 GC 回收销毁)。
总结
Go 调度器很轻量也很简单,足以撑起 goroutine 的调度工作,并且让 Go 具有了原生(强大)并发的能力。
Go 调度本质是把大量的 goroutine 分配到少量线程上去执行,并利用多核并行,实现更强大的并发。
最后编辑:joker.liu 更新时间:2023-04-23 13:43